

 English
English русский
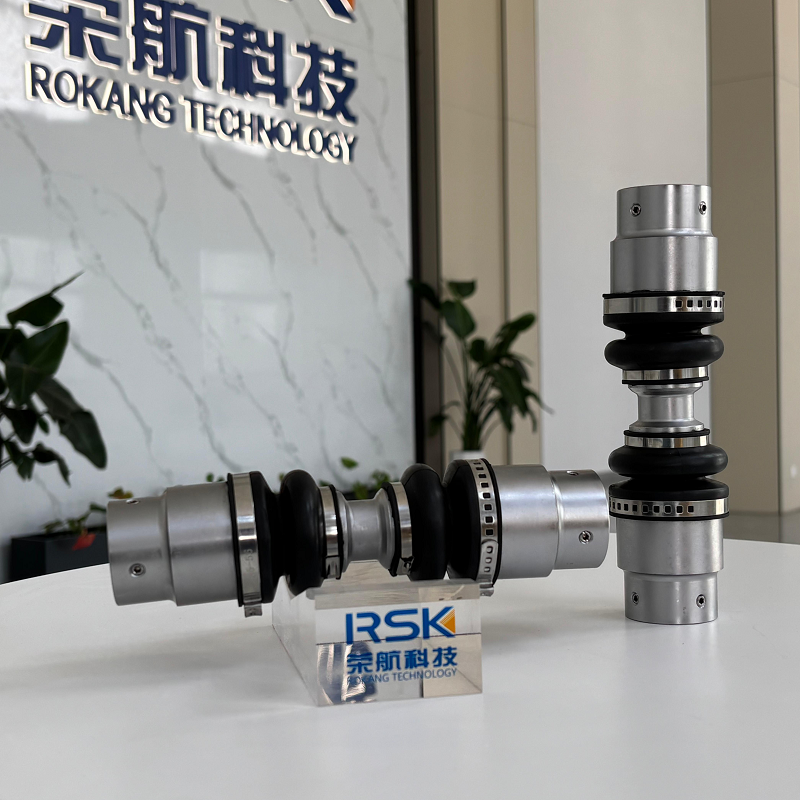
русскийA newly Micro CV Joint has been developed by RSK recently which are very suitable for the steering and suspension systems of wheeled robots, as they can solve the problem of transmission shaft angle and position changes.
In wheeled robots, the transmission shaft between the motor and the wheel is often not in a straight line, especially during robot steering or suspension deformation. The constant velocity joint enables constant velocity transmission, and features small size and high transmission efficiency.
Technical Parameters:
Bore Diameter: 12-100mm
Rotational Speed: 1-300 RPM
Rated Torque: 50-5000 Nm
Core Advantages and Suitability
Compared with traditional cross-axis universal joints, the constant velocity joint structure has three significant advantages in robotic applications:
Constant Velocity Transmission: Regardless of the steering angle of the wheel, the rotational speed of the output shaft remains consistent with that of the input shaft. This is crucial for maintaining smooth operation in robots with differential steering or Ackermann steering.
Small Size and Lightweight: The micro series can have small outer diameter and light weigh ,suitable for wheeled robots.
Multi-directional Compensation: They can compensate not only for angular misalignment but also for minor axial offsets caused by installation errors or chassis deformation, reducing lateral forces on bearings.